

متابعة – أمل علوي
تخيل روبوت إنقاذ يزحف داخل منجم منهار بحثًا عن ناجين؛ مهمته تتوقف على قدرته على فهم المشهد المحيط به ورسم خريطة له بدقة وسرعة فائقتين. هذا هو التحدي الذي يحله باحثون من معهد ماساتشوستس للتكنولوجيا (MIT) بنظام ذكي جديد يمكن الروبوتات من رسم خرائط ثلاثية الأبعاد لبيئات كبيرة ومعقدة في غضون ثوانٍ معدودة، باستخدام كاميراتها فقط ودون الحاجة إلى إعدادات معقدة.
المشكلة: قيود الخرائط التقليدية والذكاء الاصطناعي
لطالما شكلت مهمة “التوطين ورسم الخرائط في وقت واحد” (SLAM) تحديًا أساسيًا في عالم الروبوتات. بينما تقدمت نماذج التعلم الآلي في معالجة هذه المهمة، فإن أفضل النماذج الحالية لا تستطيع معالجة سوى بضع عشرات من الصور في المرة الواحدة. في سيناريوهات حقيقية مثل عمليات الإنقاذ أو في المستودعات الضخمة، يحتاج الروبوت إلى معالجة آلاف الصور بسرعة لإنشاء خريطة شاملة، وهو ما كان يمثل عقبة كبرى.
الحل: فكرة بسيطة وعبقرية “اقسم ثم الْئم”
للتغلب على هذه المشكلة، ابتكر فريق معهد ماساتشوستس للتكنولوجيا (MIT) حلاً ذكياً يجمع بين قوة نماذج الرؤية الحديثة وبساطة أساليب رؤية الكمبيوتر الكلاسيكية. بدلاً من محاولة إنشاء خريطة واحدة ضخمة للبيئة بأكملها مرة واحدة، يعمل النظام الجديد على:
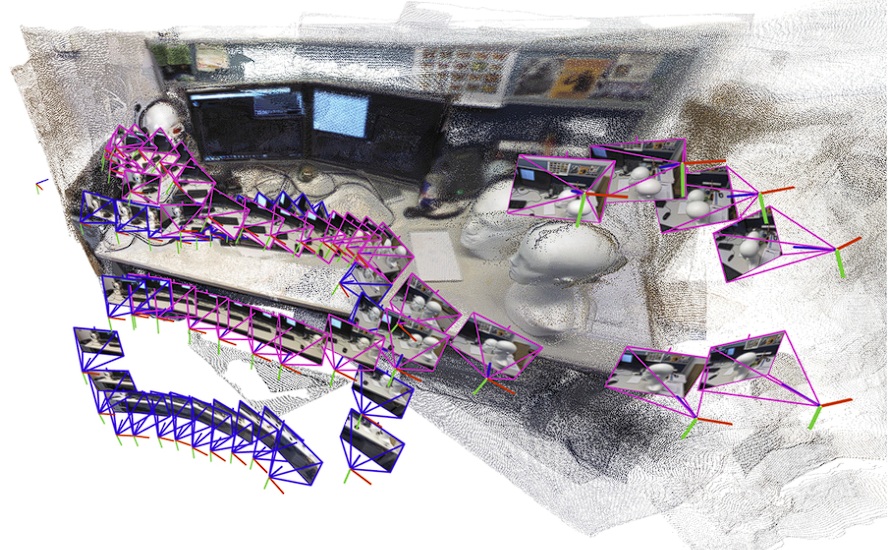
تقسيم المشهد إلى خرائط فرعية صغيرة: حيث يعالج النظام مجموعة صغيرة من الصور لإنشاء “خريطة فرعية” ثلاثية الأبعاد لجزء محدد من البيئة.
محاذاة ودمج الخرائط الفرعية: باستخدام منهجية رياضية مرنة مستوحاة من الأساليب الكلاسيكية، يقوم النظام “بلصق” هذه الخرائط الفرعية معًا بدقة عالية لتشكيل خريطة شاملة ومترابطة.
هذا النهج يتجنب مشكلة الازدحام في معالجة البيانات ويسمح للنظام بتوسيع نطاق الخريطة إلى ما لا نهاية نظريًا.
المميزات: السرعة، البساطة، والدقة الفائقة
ما يميز هذا النظام عن غيره هو:
السرعة الخارقة: يمكنه إنشاء خرائط ثلاثية الأبعاد لمساحات معقدة (مثل ممر مكتبي مزدحم) في بضع ثوانٍ فقط.
سهولة التطبيق: لا يتطلب النظام كاميرات مُعايرة مسبقًا ولا حاجة لخبير لضبط إعداداته المعقدة، فهو يعمل “جاهزًا للاستخدام”.
دقة عالية: متوسط الخطأ في إعادة بناء المشاهد ثلاثية الأبعاد أقل من 5 سنتيمترات، كما ظهر عند اختباره داخل “كنيسة معهد ماساتشوستس للتكنولوجيا” باستخدام فيديو من هاتف محمول.
التطبيقات: من الإنقاذ إلى المستودعات والواقع المعزز
لا تقتصر فوائد هذا النظام على روبوتات الإنقاذ فحسب، بل تمتد إلى مجالات عديدة، منها:
الروبوتات الصناعية: تمكين الروبوتات في المستودعات من تحديد موقع البضائع وتحريكها بكفاءة أعلى.
الواقع المعزز والافتراضي (XR): توفير خرائط بيئية فورية للأجهزة القابلة للارتداء مثل نظارات VR/AR.
المركبات ذاتية القيادة: enhancing their understanding of complex urban environments.
الخلاصة: جسر بين الماضي والمستقبل
يؤكد هذا البحث أن الجمع بين الحدس من أساليب رؤية الكمبيوتر التقليدية وقوة نماذج التعلم الآلي الحديثة يمكن أن ينتج حلولاً بسيطة وفعّالة بشكل مذهل. هذا النظام لا يمثل قفزة تقنية في ملاحة الروبوتات فحسب، بل يضع أساسًا لجيل جديد من التطبيقات الذكية التي تتطلب فهمًا سريعًا ودقيقًا للعالم المادي ثلاثي الأبعاد.
هذا المحتوى تم باستخدام أدوات الذكاء الاصطناعي.




{kind=link}